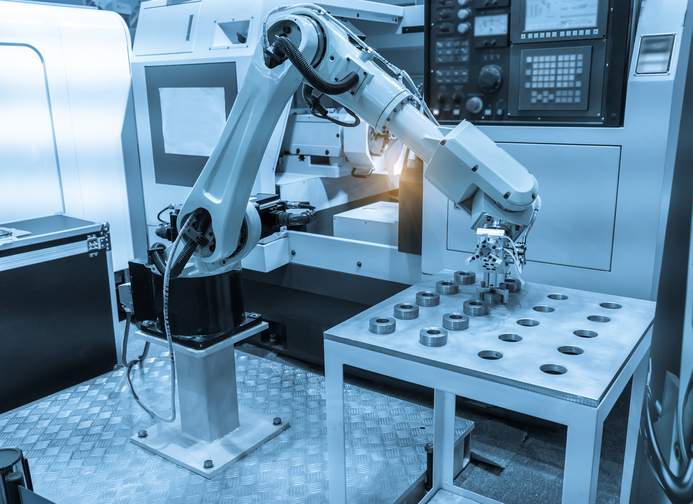
 Engineers have developed a flexible sensor “skin” that can stretch over any part of a robot’s body or prosthetic to accurately convey information about shear forces and vibration—information critical to grasping and manipulating objects.
Engineers have developed a flexible sensor “skin” that can stretch over any part of a robot’s body or prosthetic to accurately convey information about shear forces and vibration—information critical to grasping and manipulating objects.
If a robot sets out to disable a roadside bomb—or delicately handle an egg while cooking you an omelet—it needs to be able to sense when objects are slipping out of its grasp. Yet, to date, it’s been difficult or impossible for most robotic and prosthetic hands to accurately sense the vibrations and shear forces that occur, for example, when a finger is sliding along a tabletop or when an object begins to fall.
To solve that issue, the bio-inspired robot sensor skin mimics the way a human finger experiences tension and compression as it slides along a surface or distinguishes among different textures. It measures this tactile information with similar precision and sensitivity as human skin, and could vastly improve the ability of robots to perform everything from surgical and industrial procedures to cleaning a kitchen.
 A new flexible, paper-based supercapacitor could power wearable electronics.
A new flexible, paper-based supercapacitor could power wearable electronics.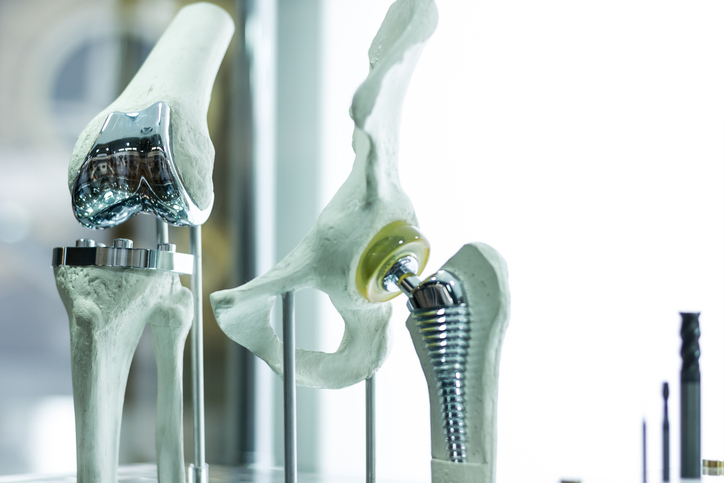 The development of prosthetics has changed many lives, providing mobility options and allowing for more active lives. But all artificial limbs aren’t perfect. Some can be painful, difficult to use, and lead to possible skin infections. The Office of Naval Research is looking to change that, providing new options for those in need of artificial limbs.
The development of prosthetics has changed many lives, providing mobility options and allowing for more active lives. But all artificial limbs aren’t perfect. Some can be painful, difficult to use, and lead to possible skin infections. The Office of Naval Research is looking to change that, providing new options for those in need of artificial limbs. Scientists have figured out how to make tiny individual films—each just a few atoms high—and stack them for use in new kinds of electronics.
Scientists have figured out how to make tiny individual films—each just a few atoms high—and stack them for use in new kinds of electronics. Researchers have developed a new way to alleviate many of the issues that make magnetic data storage for computer hard disks and other data storage hardware problematic, including speed and energy use.
Researchers have developed a new way to alleviate many of the issues that make magnetic data storage for computer hard disks and other data storage hardware problematic, including speed and energy use. Chemical engineers have generated ultra-pure green light for the first time.
Chemical engineers have generated ultra-pure green light for the first time. Engineers have created a high-frequency electronic chip potentially capable of transmitting tens of gigabits of data per second, much faster than the fastest internet available today.
Engineers have created a high-frequency electronic chip potentially capable of transmitting tens of gigabits of data per second, much faster than the fastest internet available today. A new device improves on the sensitivity and versatility of sensors that detect doping in athletics, bomb-making chemicals, or traces of drugs. It could also cut costs.
A new device improves on the sensitivity and versatility of sensors that detect doping in athletics, bomb-making chemicals, or traces of drugs. It could also cut costs.